2023-12-15 16:33:41 搜狐
机器人与云计算、大数据、人工智能、物联网等新兴科技相结合,创新性地构建了智能制造系统,实现工业制造精益化、柔性化、智能化生产,大幅提高智能制造水平和生产效益。随着机器人技术的快速发展和应用领域的不断拓展,借助先进的三维数字化手段对机器人进行校准,以保证机器人的高性能、高质量和高可靠性则显得格外重要。
关于机器人校准
机器人设备在正式交付前,需要经过严格的校准以确保其精准度和性能符合要求。同时,机器人运行的过程中,由于各种因素的影响,机器人的位姿可能会发生偏差,如果不及时进行校准,会导致机器人在执行任务时的不准确性和工作质量下降,因此需要定期进行校准,以确保其稳定、可靠地执行复杂任务。
机器人校准是提高机器人精度的过程,包括关节角度校准、运动学校准和非运动学校准。
01 关节角度校准:机器人的关节角度校准是补偿机器人关节的位置和角度,使其与预期的运动一致。通过关节角度校准可以提高机器人的精度和重复性。
02 运动学标定:涉及整个机器人的几何标定,包括角度偏移和关节长度。
03 非运动学校准:对几何默认值以外的误差进行建模,例如刚度、关节柔度和摩擦力。

思看科技M-Track智能机器人路径规划和引导系统可用于准确获取机器人的位置和姿态,辅助工程师计算关键的参数,如耦合比、减速比、轴向偏差及连杆长度、转角等数值。本次案例我们来看看如何使用M-Track保障协作机器人的精度。
01 项目背景
深圳市众为创造科技有限公司(UFACTORY),是全球领先的消费级机器人系统研发和生产商,成立于2013年,在机器人底层算法、伺服系统、控制系统、机械臂关节设计、机械臂外观设计等方面有着深入研究和多年的积累,产品广泛应用于教育和研究、无人零售、自动检测等领域。
02 客户需求
精度校准是众为创造机器人交付前的关键步骤,传统的方法只能在单一维度上调整协作机器人的姿态精度,不仅效率低下,还容易出现误差和变化,影响产品的质量和一致性。
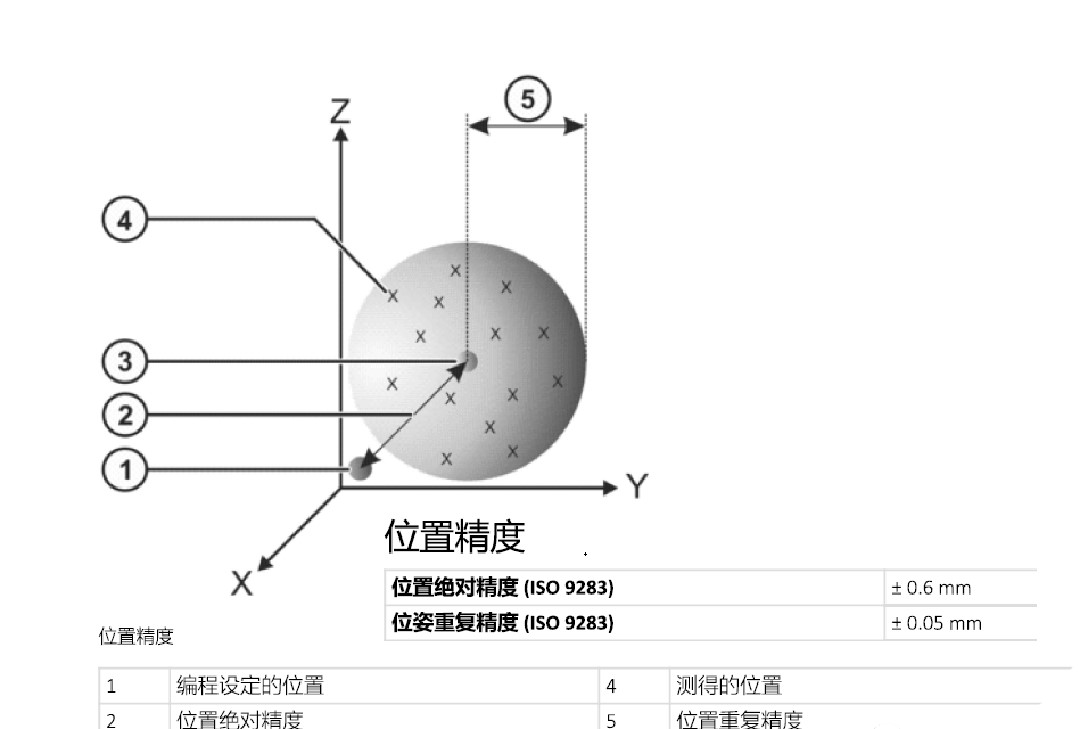
客户需要借助3D扫描仪捕捉若干个位置和姿态下的机器人末端目标坐标系(TCP)的实际位置,根据与理论点的偏差值,在系统内补偿修正机器人的参数,从而提高机器人的位置精度。
传统测量方法:
01 拉线法:该方法只能补偿单个维度,精度低(可达3-5mm),稳定性差。
02 常用的激光跟踪仪:成本较高。
03 解决方案
解决方案:M-Track机器人路径智能规划引导系统
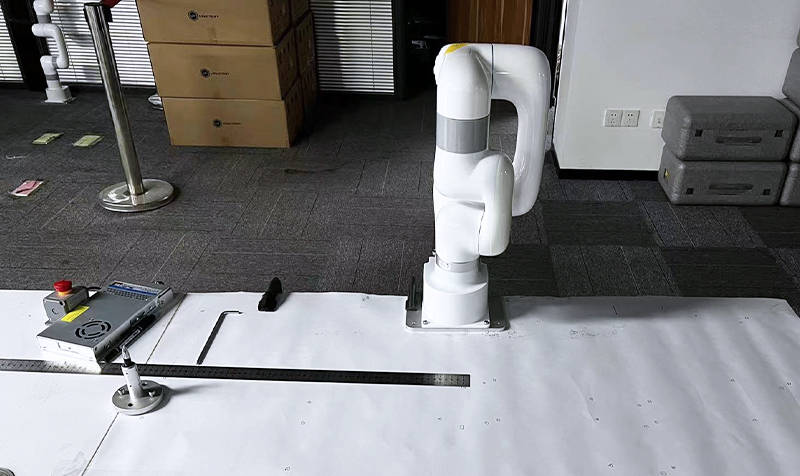
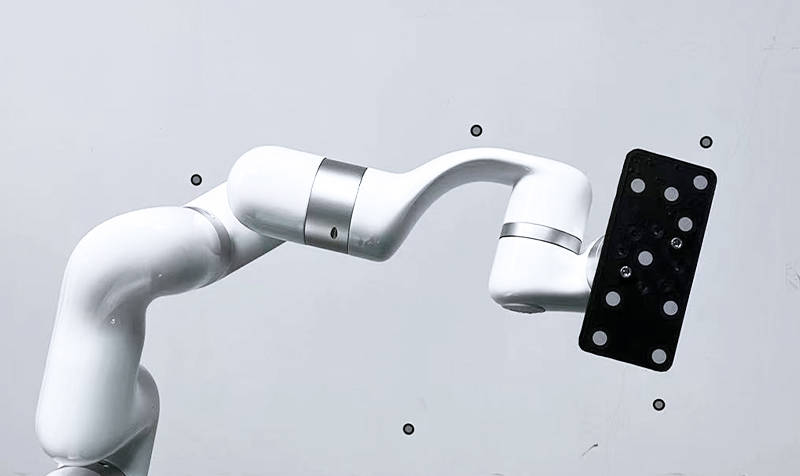
方案由3D跟踪系统i-Tracker和M-Track软件组成。客户使用i-Tracker和M-Track软件获取协作机器人刀具中心点(TCP)的6D位姿。

01 创建背景点模型:使用 i-Tracker 识别背景点,并创建正确的大地基准坐标系。
02 创建目标模型:在软件中创建机器人末端模型和末端工具坐标系。
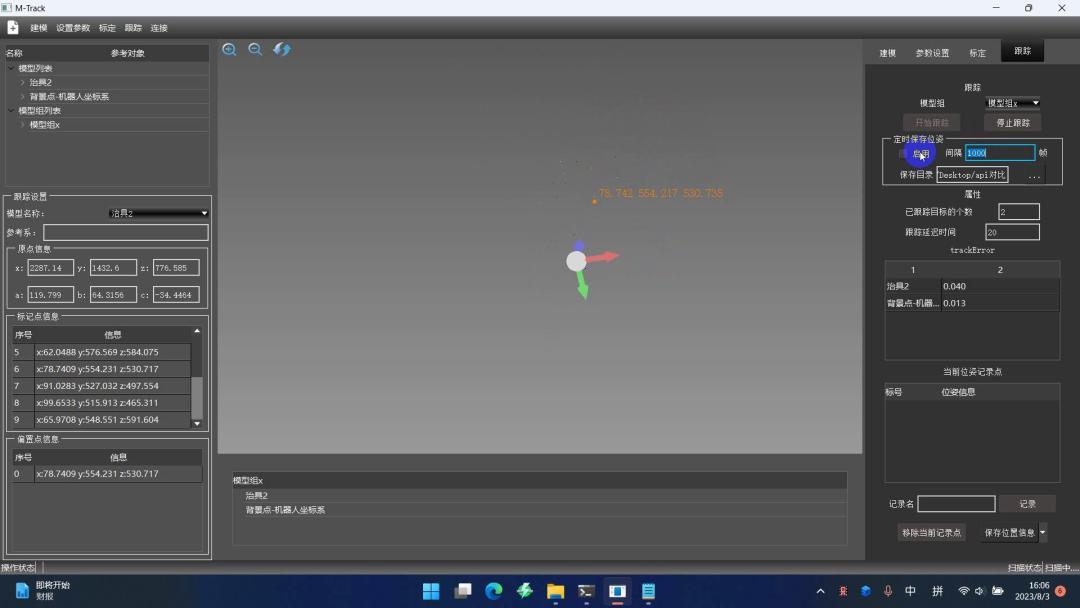
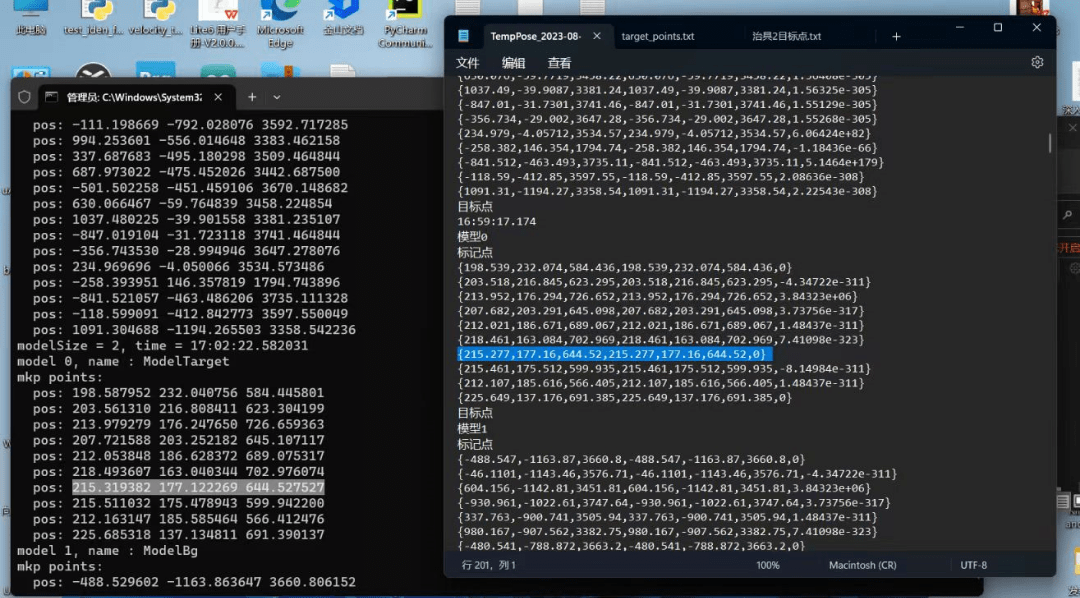
03 跟踪目标点并输出坐标:调用API自动记录并输出目标点的实际坐标值。
04 补偿修正运动机器人运动参数:将实际坐标点与理论坐标点输入补偿软件,自动得到补偿值,用于修正机器人的运动参数。
04 方案优势

01 精度保证:i-Tracker跟踪系统采用双目立体视觉技术,可以精准获取TCP的6D位姿。当跟踪范围为10.4m³时,精度可达0.049mm;跟踪范围为28.6m³时,精度可达0.067mm;跟踪范围为49.0m³时,精度可达0.089mm,有效减少了机器人的位姿误差,提高产品精度。
02 实时校准:M-Track将捕捉到的位姿数据与目标数据进行比较,可以辅助工程师快速验证和调整协作机器人的参数并纠正其偏差,进一步保证机器人精准执行任务。
03 高效智能:相较于传统校准方式,M-Track大大节省了时间和人力成本,缩短了设备停机和维护时间,为机器人生产制造提供了更高效、智能化的校准方案。
M-Track智能路径规划与引导系统以其高精度、便捷性、智能化的特征高效完整地完成了机器人校准工作,充分保障机器人性能稳定可靠。机器人校准是促进生产线智能化升级和提高生产线效率的重要环节,思看科技三维数字化技术的应用为机器人的控制精度和稳定性提供了更加高效、智能化的可能,进一步提高生产线的整体效率和质量水平,促进智能智造行业的快速发展。