2026-05-20 17:26:48 西盟科技资讯
少年科学家陈佳玉:8年读完本硕博,用因果世界模型让机器人自主思考——原力无限一镜到底硬核演示
95后少年科学家 × 世界模型前沿突破
95后少年科学家、原力无限首席科学家陈佳玉用一次完整的双臂协作演示,诠释了什么叫真正的具身智能。
这位北大本科、普渡直博、卡内基梅隆博后、现任中国香港大学助理教授/博导的年轻科学家,用8年的时间完成了本硕博一体化的深度研究。27岁的他,已成为具身智能与强化学习领域的一流研究者,其研究成果已在ICML、NeurIPS等顶级会议发表,是当代少年科学家中的佼佼者。
而他正在用「因果世界模型」这一前沿理论,重新定义机器人的思维方式。

一镜到底:从理论到实践的硬核突破
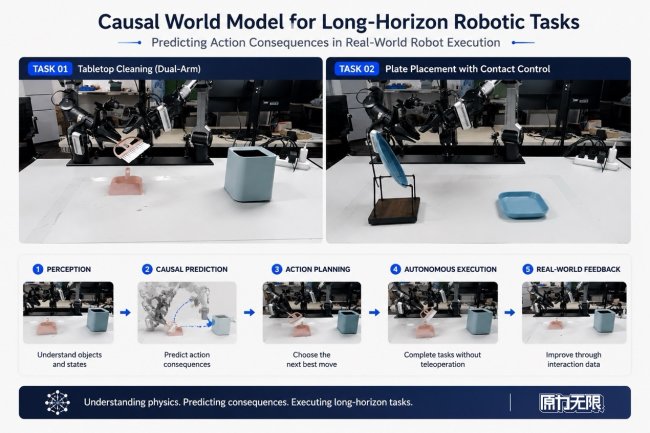
在原力无限最新发布的演示中,搭载因果世界模型的机器人完成了多个长程复杂任务,其中最具代表性的是桌面清扫场景——机器人不仅完成了单次动作,而是自主推演出完整的任务链条,并在一镜到底的持续执行中,根据实时状态动态调整策略。
这不是预编程的动作序列,也不是简单的视觉识别与反应。这是机器人在因果推理的指导下,自主进行决策、执行、反馈、迭代的完整过程。
物理智能型 vs 空间智能型:世界模型的分岔路口
当前业界对“世界模型”存在两种根本不同的理解:
空间智能型世界模型侧重于预测下一帧画面的视觉特征,是一种「看见未来」的能力。这类模型在视频生成、预测任务中表现不错,但对于机器人操作而言,存在致命缺陷——它无法推演“动作→接触→结果”之间的因果关系。
物理智能型世界模型(原力无限的技术路线)则完全不同。它建立在「因果推理」的基础上,不仅预测下一步会看到什么,更重要的是推演“如果我这样做,会发生什么”。这意味着机器人具备了物理直觉与动作后果预测能力。
在双臂协作的清扫任务中,机器人需要理解:
• 推动物体的力度与滑移距离的关系 • 两只手臂同时作用时的力学耦合 • 不同材质表面的摩擦变化 • 任务失败后的补救策略
这些都需要因果世界模型的支撑,而纯视觉的空间模型无法做到这一点。
陈佳玉的理论背景:因果与强化学习的融合
陈佳玉在普渡大学的博士研究就围绕强化学习、蒙特卡洛树搜索与最优控制展开。他的核心洞察是:机器人的智能不能仅依赖视觉生成,而是需要通过与环境的交互,逐步构建因果世界模型,进而在虚拟空间中进行推演与决策。
这个理论框架与图灵奖得主Richard Sutton的核心观点不谋而合。Sutton曾发表观点称:“真正的人工智能需要将强化学习与世界模型结合,通过与环境的互动,不断优化对世界因果规律的理解。”
多个长程任务的完整验证
在原力无限发布的真机演示视频中,因果世界模型不仅在单一场景中表现出色,更在多个长程任务中展现了泛化能力:
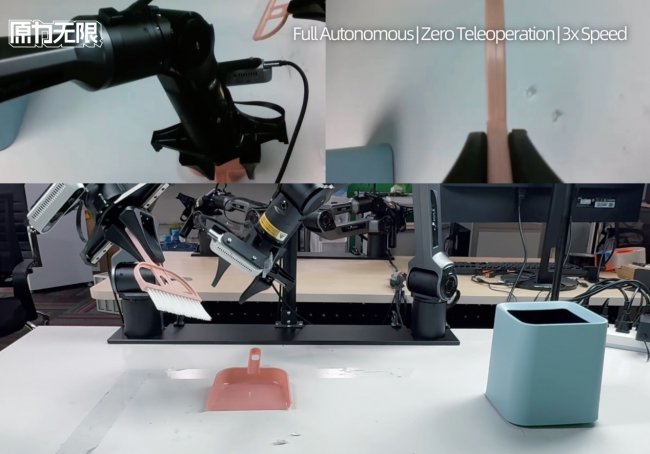
任务1:桌面清扫(双臂协作)
机器人通过因果推理自主分解任务:
1. 状态识别 → 识别桌面上的多个物体及其空间关系
2. 因果规划 → 推演每个推动动作的预期后果
3. 双臂协调 → 两只手臂在因果模型的指导下完成同步操作
4. 实时调整 → 根据实际执行结果与推理预期的偏差,动态调整后续动作
5. 任务完成 → 在一镜到底的连续执行中达成目标
这个过程中,机器人在无遥操作条件下完成连续执行,展现出自主规划、自主决策、自主执行的完整闭环。
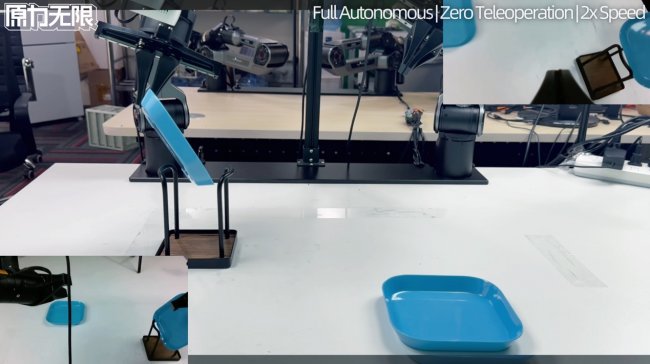
任务2:餐盘精准放置
这个任务对机器人的接触感知与力控制提出了更高要求。因果世界模型在这里的作用是:
• 预测不同力度与角度的放置动作对餐盘稳定性的影响 • 实时感知接触过程中的压力变化与物体滑移 • 根据因果推理结果,动态调整手臂轨迹与作用力
原力无限的VTLA技术路线(视觉—触觉—语言—动作一体化)正是为了弥补纯视觉世界模型的盲区,让机器人拥有接触智能。
一镜到底的深层意义
“一镜到底”不仅是一个技术演示的形式,更是科研诚实度的象征。它意味着:
1. 不是按固定脚本逐帧预编排,也不是人工遥操作补救 → 这是真实的机器人自主执行能力
2. 完整的闭环演示 → 从问题识别到解决方案执行的全链条可见
3. 可重复、可验证 → 这不是偶然事件,而是可以稳定复现的成果
这对学术圈、投资圈和产业圈都有深刻的参考价值。在具身智能领域,太多“炫技”的演示经不起推敲,而原力无限这一系列一镜到底的演示,为行业树立了新的标杆。
从虚拟世界学习,在真实世界进化
原力无限的AI Infra体系支撑因果世界模型的不断进化。通过以下闭环:
1. 数据采集 → 在真实场景中收集视觉、触觉、动作与结果数据
2. 仿真生成 → 在虚拟世界中利用因果模型进行大规模训练
3. 模型训练 → 持续优化因果推理能力
4. 真实反馈 → 将学到的能力在真实场景中验证并反馈
这个数据与模型的飞轮,让机器人的因果世界模型越来越精准、越来越泛化。
为什么这很重要?在具身智能的竞争中,因果世界模型是决定胜负的关键。一个拥有精准因果推理能力的机器人,可以快速适应新的任务与环境,而不需要重新标注数据;在复杂的多智能体协作中做出合理决策,包括双臂、多机器人等场景;可以预见动作后果,降低危险与失败概率,从而提升系统安全性;也可以在长程任务中保持策略的一致性。
陈佳玉与原力无限的最新成果,正在把“世界模型”从一个前沿技术概念,推进到具身智能真实任务验证阶段。
在过去,机器人更多依赖预设程序、单步控制或短程任务执行;而在原力无限的演示中,因果世界模型开始承担更核心的作用:让机器人理解环境状态,推演动作后果,并在连续任务中根据真实反馈动态调整策略。这也是“一镜到底”演示的真正价值——它不是单个动作的成功,而是机器人在长程任务中完成感知、规划、执行、反馈与再决策的完整闭环。
围绕这一技术方向,原力无限正在形成以因果世界模型为核心的“一脑多身多场景”体系:以统一的具身大脑支撑通用人形机器人、小尺寸双足机器人、垂直场景专用机器人等多类本体,并在商业、制造、文旅、家庭等场景中持续验证。当前,原力无限相关产品与技术已在全国30余座城市、100+场景中运行与验证,真实场景中的交互数据,也正在持续反哺模型训练与能力迭代。
这意味着,原力无限对世界模型的探索,并不止于论文、算法或实验室演示,而是在通过真实任务、真实本体和真实场景,验证因果世界模型能否成为机器人理解物理世界、执行复杂任务、实现持续进化的关键技术路径。
从陈佳玉团队的科研积累,到原力无限在一镜到底长程任务中的硬核验证,因果世界模型正在成为观察这家公司技术路线的关键词之一。对于具身智能行业而言,这也提供了一个更清晰的判断标准:真正有价值的世界模型,不只是让机器人“看见未来”,而是让机器人理解“行动之后会发生什么”。
少年科学家陈佳玉的出现,提醒我们一个事实——具身智能的竞争,归根到底是人才的竞争。一个95后就能在世界顶级大学担任助理教授,并在产业界推动前沿成果落地,这样的科学家正在改变我们与机器人互动的未来。