2024-07-18 16:51:33 中华网汽车
与行人发生碰撞、被路上的垃圾袋“逼停”、在绿灯状态下停滞不前、转弯时卡顿不动……这几天,有关萝卜快跑的相关话题屡登各社交平台热搜榜。无人驾驶出租车固然火了,但其行驶过程中出现的种种“小插曲”,反映了智能驾驶技术在实际应用中的挑战,也引发了公众的热议,目前辅助驾驶功能究竟靠谱吗?
公众关切的背后,折射出汽车智能化正快速融入大众生活,成为消费者购车决策中的重要考量因素。那么,普通消费者又该如何判断一辆车智能化水平的高低呢?此时,专业权威的第三方评价显得尤为重要。7月1日起,由“汽车测评国家队”中汽测评发布的中国智能网联汽车技术规程(C-ICAP)2024版正式实施,根据行业技术发展再一次更新了测评场景,可对车辆辅助驾驶性能进行独立、公正、专业的评价。

行人突现车前,车辆能否“机智识别”?
汽车在日常行车过程中,难以避免会遇到行人穿行、道路施工、交通事故等突发场景,紧急避险能力着重考察车辆在突发情况下的主动安全能力。对此,2024版C-ICAP基础行车辅助测评细则中新增了目标位纵向移动的场景。
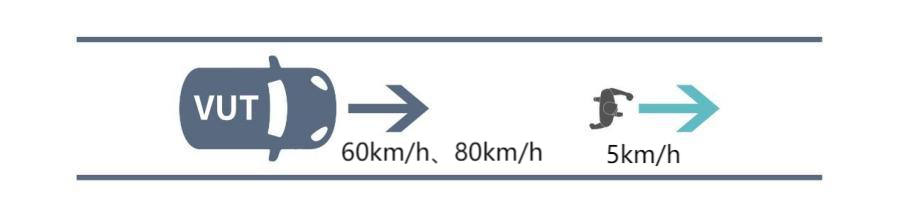
目标物纵向移动测试场景
据介绍,在基础行车辅助测评细则中,目标物纵向移动测试模拟行人在机动车道行走的危险情况,测试车辆以60km/h、80km/h的速度快速行驶,对车辆行车辅助功能的安全性进行较高难度的测试。
车后行人或自行车干扰,考验智能泊车真功夫
辅助驾驶系统虽然能够提供一定程度的自动化支持,但驾驶员仍然是功能操作和责任主体。这意味着,即使在辅助驾驶模式下,驾驶员也需要保持对车辆的监控,随时准备接管车辆的控制权,典型如泊车场景,自动泊车系统可以让停车变得更便利,但有其自身的局限性,在靠路边停车过程中,经常会遇到后方出现二轮车和自行车的情况,因此,驾驶员在泊车仍要注意观察。
为模拟泊车过程中后方遇到自行车或行人场景,2024版C-ICAP基础泊车辅助测评细则中引入了平行车位-车位线车位泊入测试场景。
据了解,在基础泊车辅助测评细则中,该场景由三个车位线车位、障碍车辆和自行车构成。一障碍车辆静止在车位内,自行车放置在目标车位相邻车位旁。

路边停车遇自行车
测试过程中,当试验车辆搜索到目标车位并静止后,测试工程师选择目标停车位启动泊车辅助系统后,自行车沿预定路线行驶,刹停于目标车位中线处,干扰试验车辆的泊入过程。
在部分地下停车场中,停车位与出入口相邻,导致泊车过程中可能会遇到行人横穿。为模拟该场景,2024版C-ICAP规程基础泊车辅助测评细则中引入了垂直车位-车位线车位泊入测试场景。
测试过程中,在试验车辆最后一次入库过程中,当车尾越过车位线前沿时,行人目标物出发并穿过目标车位,考验车辆的避障能力与安全性。
随着智能网联技术的快速发展,智能网联汽车的市场占有率逐步走高,辅助驾驶功能的装车率屡创新高,科学客观公正的测试及评价车辆辅助驾驶性能表现,已成为消费者购车决策中的重要参考指标。业界期待2024版C-ICAP的落地实施,中汽测评将以“汽车测评国家队”的身份,从第三方测评视角,为消费者提供更多车辆智能网联性能表现,同时推动汽车产品优化智能表现,不断改善车辆智驾体验。