2025-07-28 15:30:46 中华网
具身智能机器人在检验检测实验室的应用需突破多模态感知、灵巧操作、认知决策等核心技术,并通过仿真训练、大模型微调等路径实现落地。
一、核心技术瓶颈
1.多模态感知融合
触觉与视觉协同:实验室操作需识别微米级缺陷(如试管裂纹、液体浊度),现有触觉传感器分辨率不足(<0.1mm),且视觉-触觉数据时空对齐误差>15%,导致液体泄漏或器皿破损漏检。
化学物质感知:需突破多光谱传感技术,实时分析试剂成分(如pH值、浓度),避免传统传感器受腐蚀性气体干扰导致的误判。
2.灵巧操作与自适应控制
精密器械操作:实验室场景涉及移液枪、离心机等设备,机械手需实现0.01N级力控(如开合试管塞),当前关节模组精度仅达0.1N,易导致样本污染。
抗干扰能力:电磁设备(如核磁仪)干扰下位姿飘移>5mm,需开发抗扰运动算法,确保机械臂在强磁场中稳定操作。
3. 认知决策与任务泛化
非标流程理解:实验室存在动态任务(如突发样本复检),现有模型对未知流程泛化率<40%,需构建缺陷知识图谱,实现“异常检测→因果推理→自主复检”闭环。
实时决策延迟:突发状况(如液体洒落)需80ms内响应,传统系统延迟>200ms,需压缩世界模型推理时间。
4. 系统可靠性与安全控制
故障预判:实验室连续作业要求故障检出率>99%,但传感器失效或算法误判可能导致连锁事故,需虚拟测试平台模拟千级故障场景。
生化安全防护:机器人需自适应消毒流程(如UV灭菌),当前材料抗腐蚀性不足,长期接触试剂易老化。
二、可行技术路径
路径1:仿生学习与专家知识迁移
机制:通过动作捕捉手套采集检验员操作数据(如滴定力度、震荡频率)→ 构建“触觉-动作”映射库 → 强化学习训练灵巧操作策略。
案例:机器人通过遥操作学习治疗师动作,成功完成实验室ADL训练(如移液操作),误差率降低90%。
路径2:大模型基座+垂直场景微调
架构:
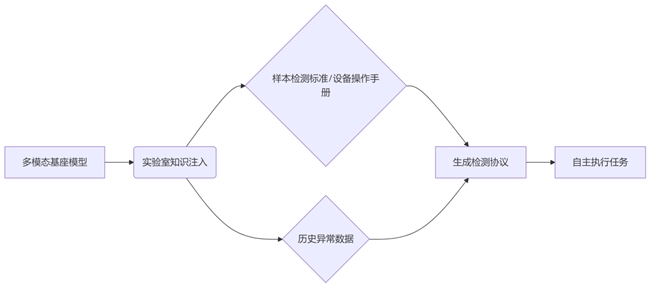
实践:平台支持开发者微调行业模型,在化学检测任务中拆解“毒性分析”为7层子任务,识别准确率提升至95%。
路径3:渐进式环境适应训练
三阶段流程
1、数字孪生仿真:高保真重建实验室环境(如通风系统、设备布局),模拟10万+操作场景。
2、迁移学习补偿:通过Sim2Real技术校正现实偏差(如光线变化导致的视觉误差)。
3、在线自优化:实时采集操作数据闭环优化模型,新设备适配时间从30天缩短至8小时。
路径4:群体智能协同检测
模式:多机器人联邦学习共享知识,例如:
机器人A扫描样本二维码 → 云端调取检测标准 → 机器人B执行离心操作 → 边缘节点融合结果生成报告。
效能:某生物实验室采用群体协同,检测通量提升3倍。
路径5:轻量化硬件与抗干扰设计
材料革新:采用仿生肌腱关节实现6小时高负荷作业,耐腐蚀涂层提升试剂环境适应性。
分布式算力:端侧部署轻量化模型(如非Transformer架构),算力需求降低70%,响应延迟压缩至50ms内。
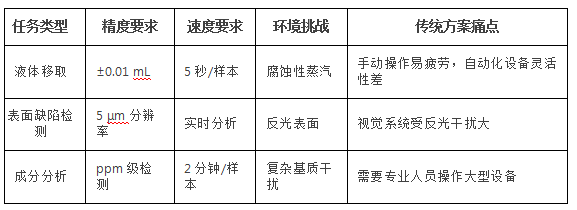
三、典型场景技术适配案例
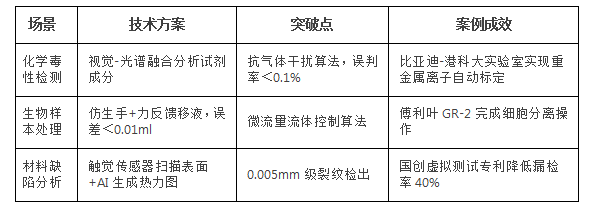
表:检验检测实验室典型操作任务的技术要求对比
四、生态与政策助推方向
1. 测评标准建设
依托“具身智能测评实验室联合体”,制定实验室场景测试规范(如操作精度、生化安全等级),推动认证标识跨平台互认。
2.数据共享机制
共建开源数据集,汇集百万级实验室操作数据,解决训练样本匮乏问题。
3.算力与政策支持
利用地方政府补贴降低模型训练成本,开放核电、医疗等高风险实验室场景加速验证。
综上,具身智能机器人在检验检测实验室应用的突破关键在于“感知精细化→操作拟人化→决策因果化”。此路径短期可聚焦灵巧操作与大模型微调,中期需构建实验室物理常识库,通过产学研协同打通技术-应用闭环。
据悉,国内检验检测信息化管理软件头部企业北京三维天地科技股份有限公司与具身智能机器人领域领军企业北京人形机器人创新中心有限公司,正在就联合打造检验检测实验室专用具身智能机器人集群展开研究论证,相信通过多方合作、上下游协同,具身智能机器人在检验检测行业的技术瓶颈即将突破,产业化落地也即将实现。